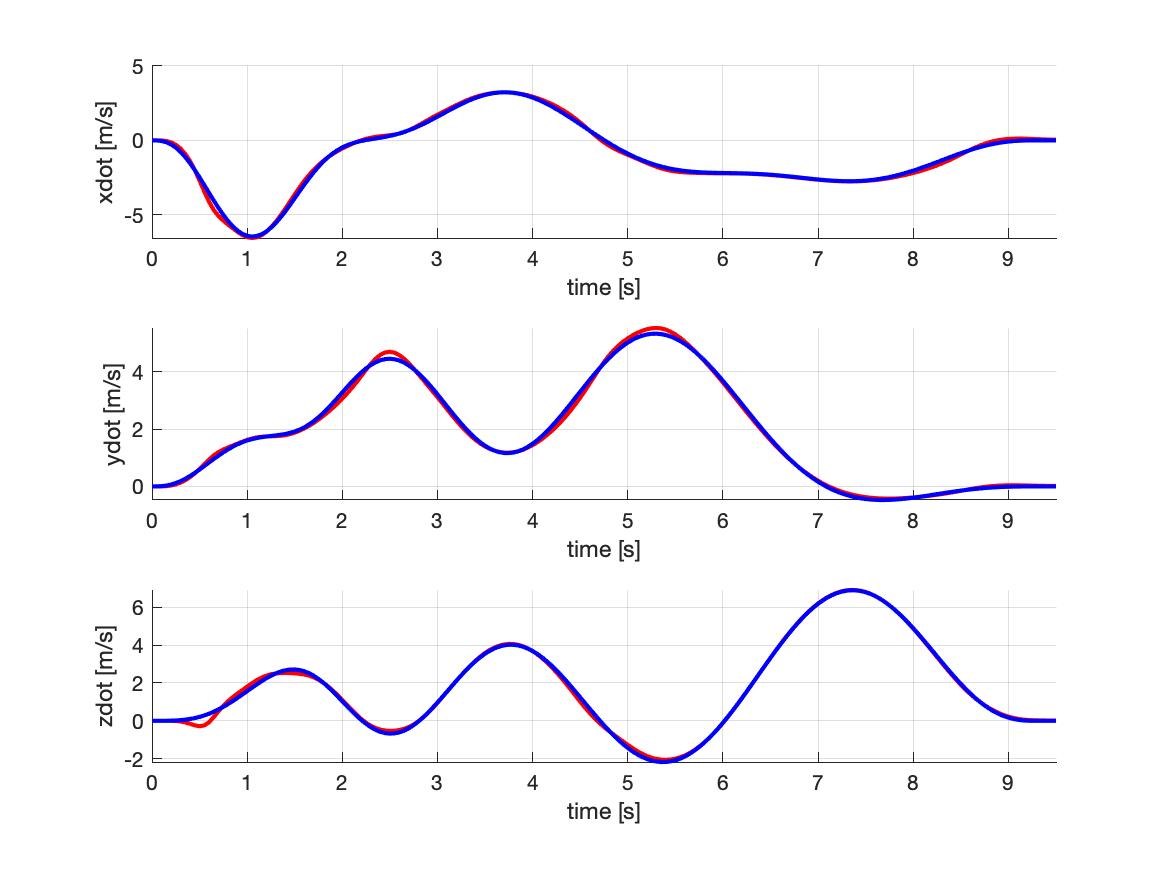
Visualize an algorithm for planning trajectory
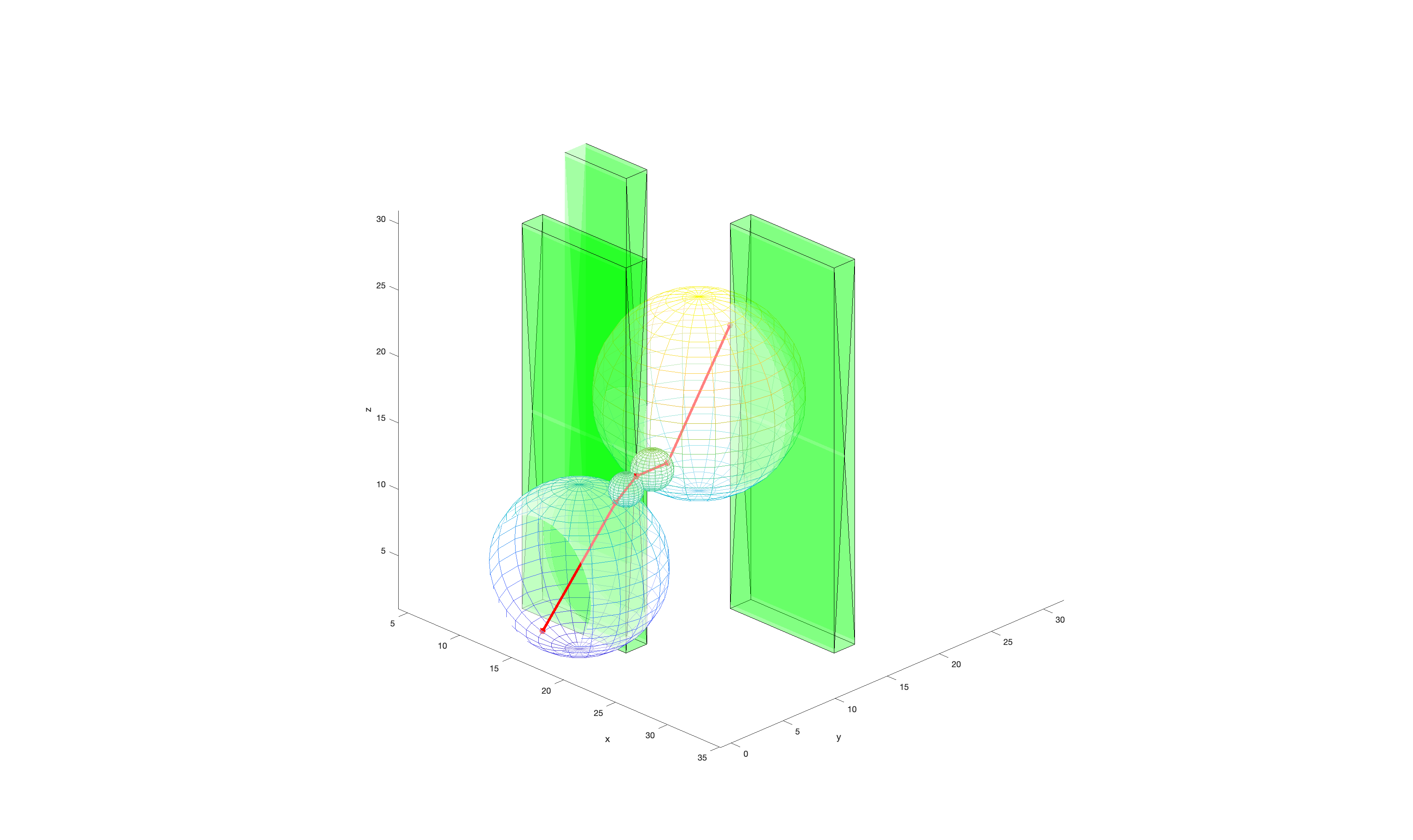
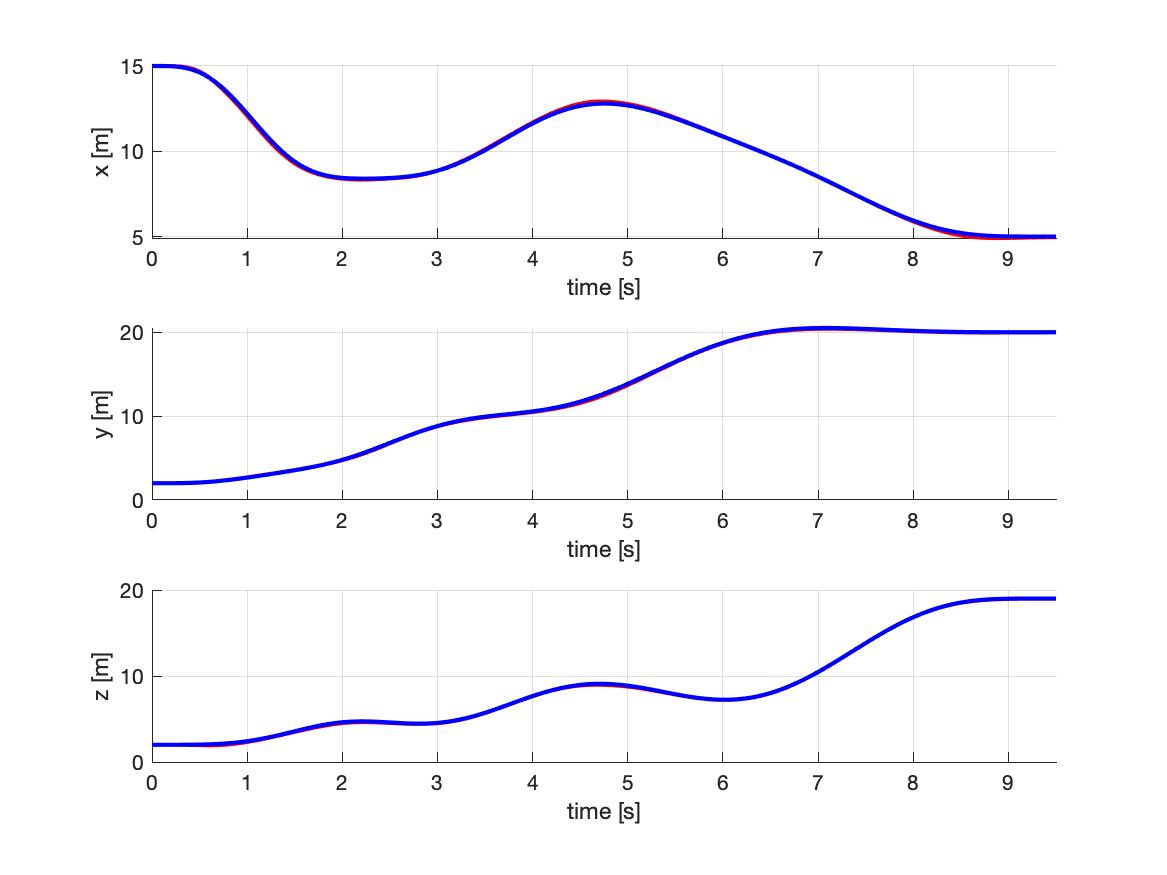
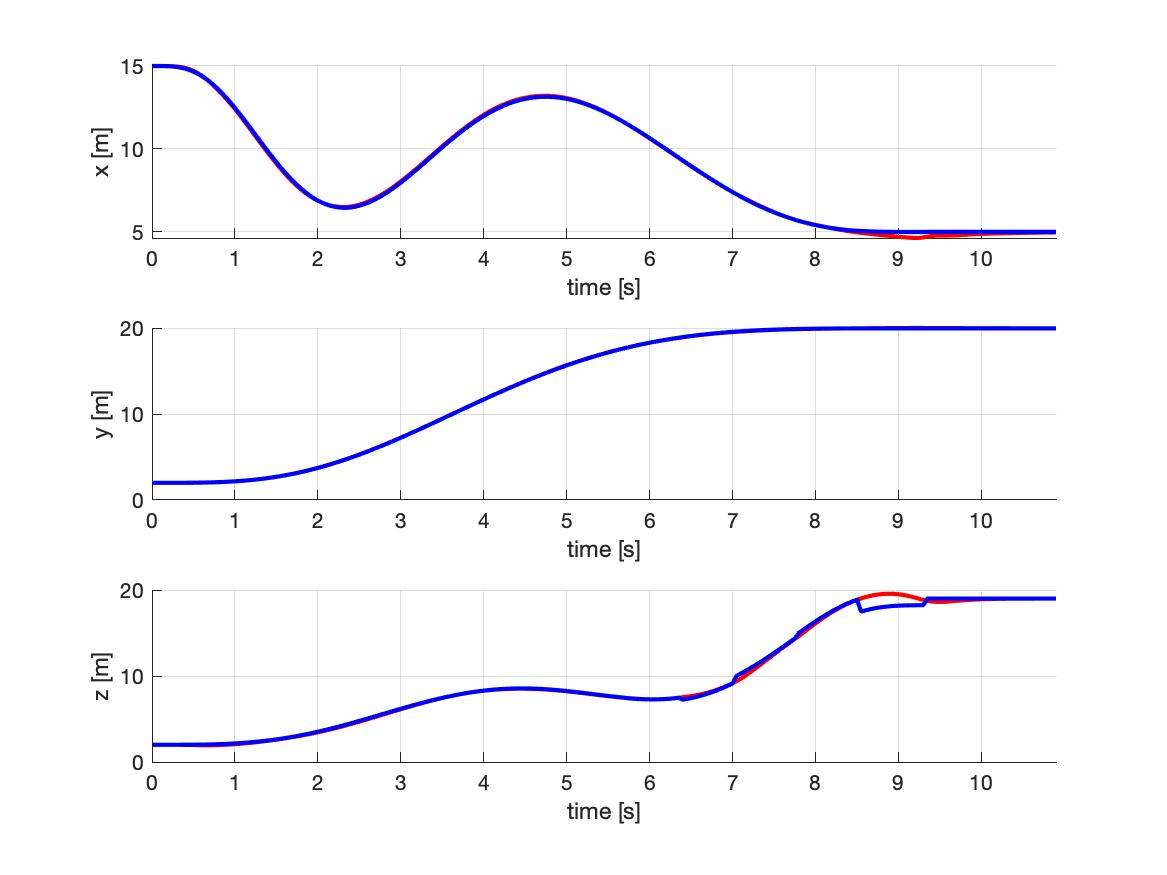
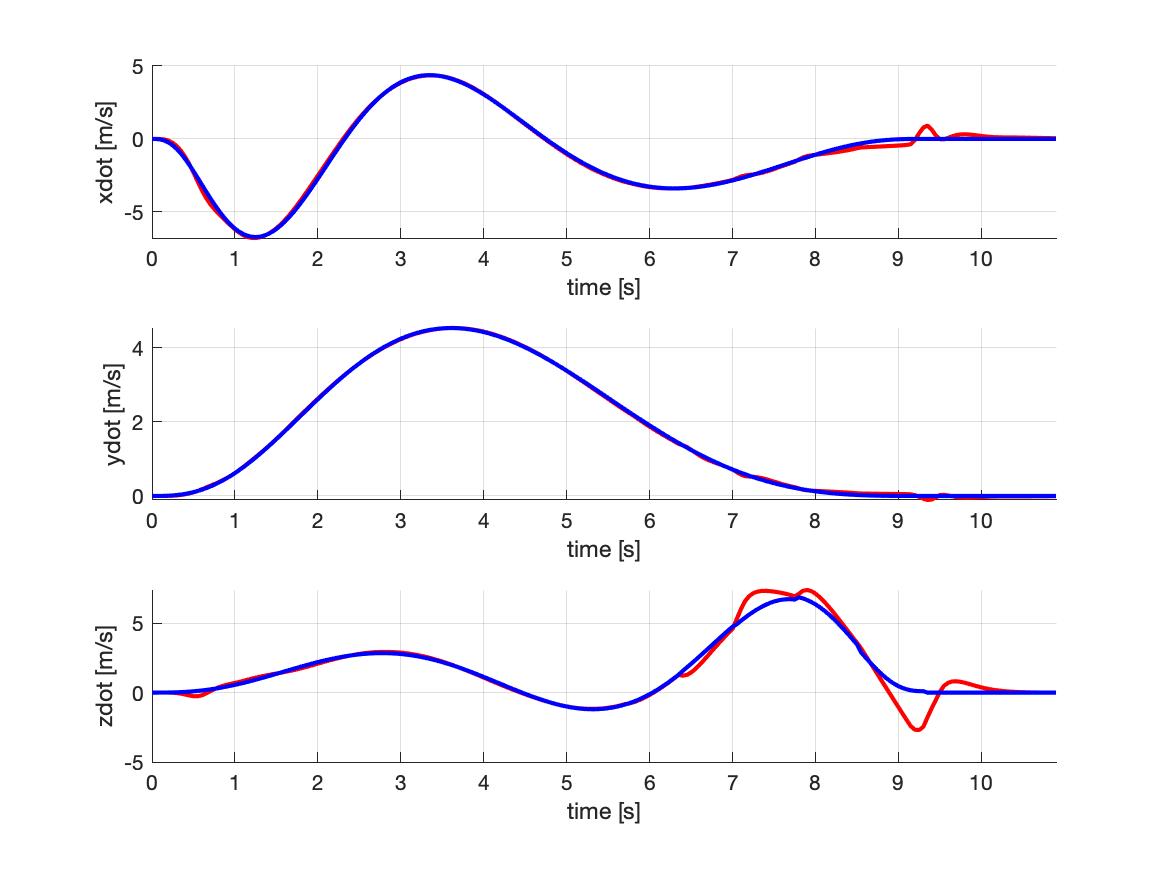
The Trajectory pass every Path point.
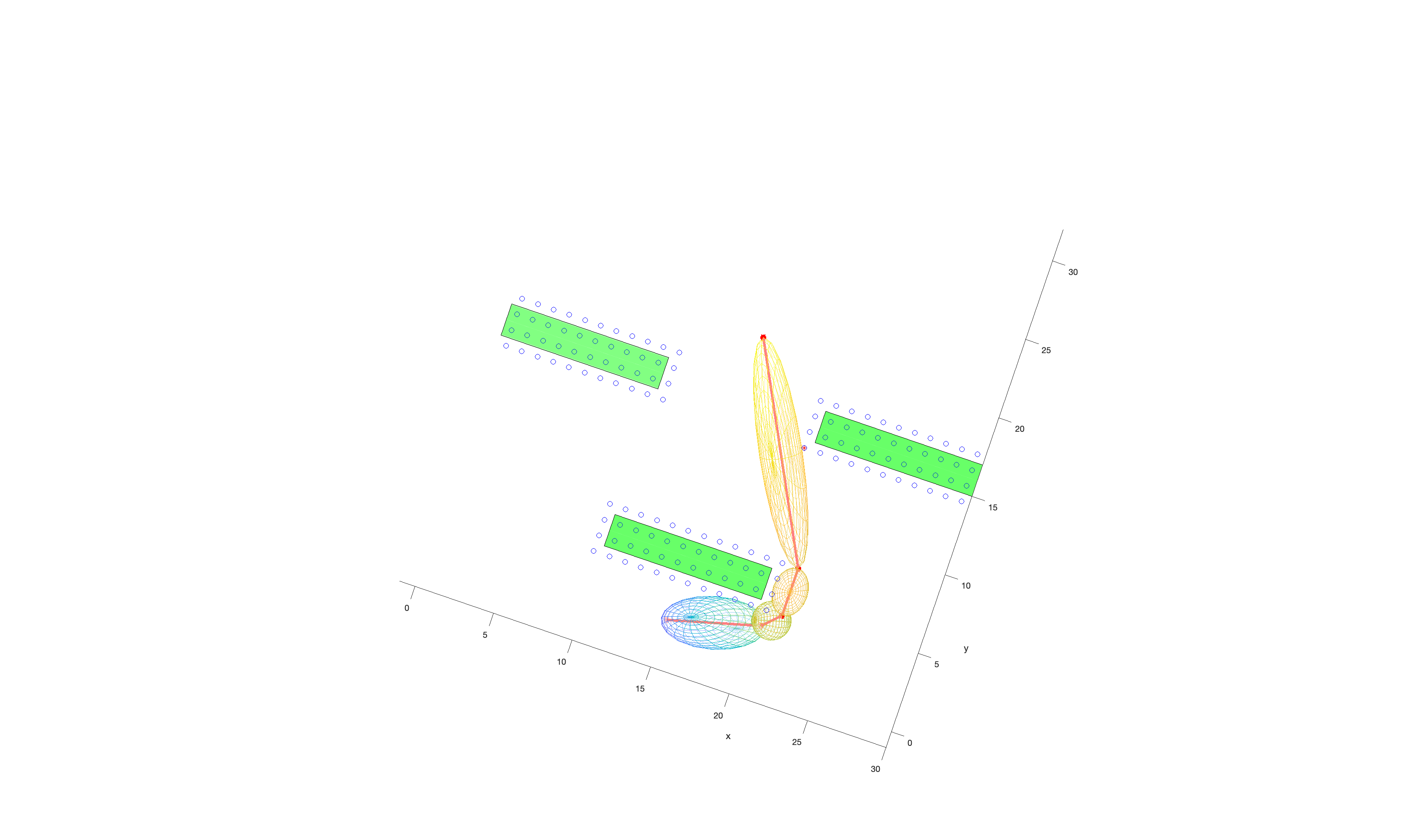
The Trajectory don't need to pass every Path point.
minSnapValue(X + Y + Z) is : 9376.0901
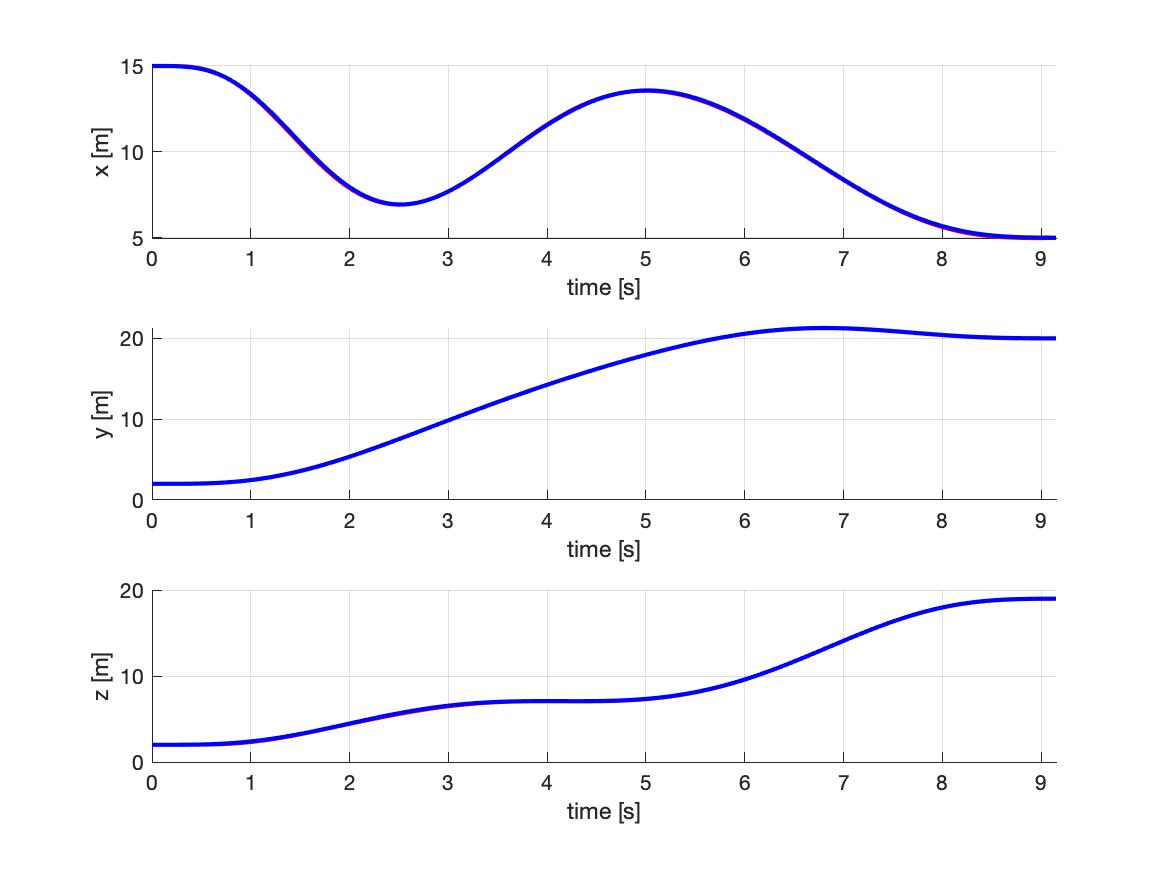
The Trajectory don't need to pass every Path point.
minSnapValue(X + Y + Z) is : 2958.5877
Here is my Project code.
Here is my technical paper.
If you want submit bug, touch here