Walter Gray
wrgray@ucsc.edu
CS 161, Final Project
This is my final project for CMPS 161 demonstrating physically
based modeling of large numbers of objects
The readme with instructions for the controls can be found here
Outline
The overall goal of this project was to create a simulation of a
huge number of physically constrained objects. The original plan was
to be completed in two phases. First the underlying physical
simulation would be put in place. This would enable objects to be
dynamically inserted and removed from the simulation, and enforce
physical constraints on the objects. The base required physics model
included Brownian motion, spring connections, collision detection,
and the ability of the user to drag objects around with the mouse.
Individual objects would also be able to multiply and delete
themselves under certain conditions. The second, and more complex
part would concentrate primarily on graphical enhancements and adding
more diverse behavior. Some examples include the ability for
different clusters of cells to function in different ways, multiple
cell types and the ability for cells to infect others or mutate
themselves, a deformable boundary around cell clusters, or a more
realistic looking division behavior when spawning.
Product
The first phase is 100% completed, however nothing has been done
on phase two. Exact features include:
-Objects are dynamically
created and deleted from the heap
-Objects may be picked and
dragged about the screen
-Objects collide against each other in a
soft manner
-Objects may delete themselves
-Objects may
duplicate themselves
-All objects have a constant frictional force
as well as Brownian motion applied to them
-Objects use predictive
collision detection to ensure they are never outside the level
boundaries
-The Simulation frame rate is completely decoupled from
the render frame rate.
-Different simulation states are
interpolated to create an illusion of higher resolution
physics
Also, thanks to the judicious use of reference counted
smart pointers, there are no known conditions that cause a
segmentation fault and memory leaks are scarce The architecture is
shaky, but it should hold up well.
What Went Right
One of the other features I am quite happy with is the underlying
physics engine. While it could be vastly improved and optimized by
more clearly defining the ownership and responsibility of certain
member classes, It does have several very nice features, and has
seems to be both deterministic and stable: A somewhat tricky thing to
pull off while maintaining speed. It does only use Euler integration,
but to help make up for that it uses a completely fixed time step, so
the consistency issues arising from differing integration lengths are
eliminated. Normally this would result in a somewhat jerky animation,
but the trick here is that it can interpolate between physics updates
to make the rendering appear smooth while the actual simulation might
be stuttering. There is still a definite error, and if the time step
is set too low the springs will explode, but that can be avoided by
simply increasing the simulation time step in Simulator.cpp. The
collision response could also be improved slightly for realism, but
on the whole I'm fairly pleased with it.
What Went Wrong and How It Could Be Fixed
Perhaps the most glaring issue with this program is how slow it
can get. Though I don't have a profiler handy, I suspect that the
collision detection algorithm is responsible. It only checks every
pair once, and it excludes objects that it already has a spring
connection to, but it is still O(n^2), which is simply unacceptable
if you want 500+ objects on screen and moving at once
In retrospect, The largest thing that messed this whole thing up
was the use of dynamic allocation and poor definitions of ownership.
Given that it was possible, and even reasonable to have some
arbitrary cap on the number of simulated elements, as well as the
fact that each cell wasn't terribly large, allocating things from the
stack instead of the heap would have been a much better choice. There
is also a lot of cross ownership going on. Every system has pointers
going to the internal bits of other systems... It's ugly, and if it
wasn't for many hours of debugging It wouldn't work at all. I think
that not having to worry about checking for null constantly or inform
other subsystems of deletion would both vastly improve performance,
and allow much greater compartmentalization.
Really, this should have been modeled as a glorified particle
system, with some max # of cells being allocated on creation and
simply having some bIsInUse flag to indicate if they should be drawn
or simulated or not. This would also have eliminated the need for
smart pointers entirely since once allocated, the particles would not
be deallocated until the particle system object containing them was
destroyed anyways. Such a model would have automatically provided an
ID system in the form of the index of the object, since I didn't care
about wrapping or Re-use. Even better, I would have had one and only
one central repository for the particles which everything else would
be subordinate to. This could significantly cut down on information
sharing, since subsystems could point directly at the objects and
never have to worry about informing other subsystems about what they
did to them, and having all active cells in one handy list is also
the first step towards optimizing the collision detection with a
spacial hashing function.
To make a long story short, now that I'm actually conscious and
not cramming like mad to get a working product finish, I'm kicking
myself for not thinking of most of this stuff sooner. It would have
probably saved me hours of debugging work and produced a higher
quality result.
Downloads
Windows Exe :
Download
Source Files :
Download
Screen Shots
A
Typical Screen:
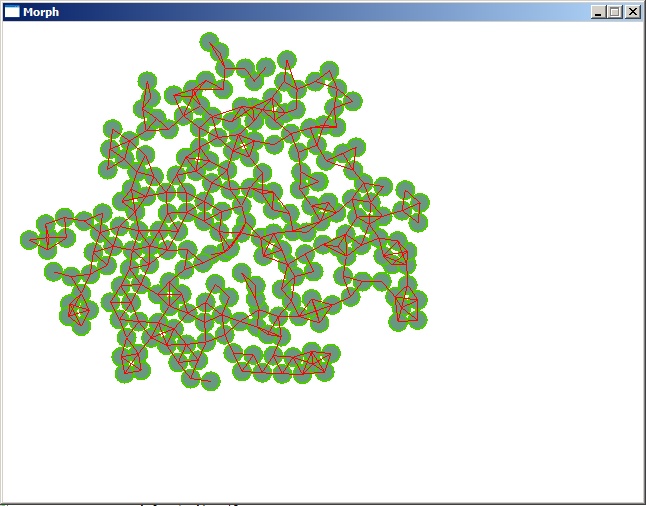
With Springs Viewable:
Another typical shot:

Due
to the interactive nature of the application, I recommend that you
simply run the exe or compile using the provided source files if you
want to see it in action.