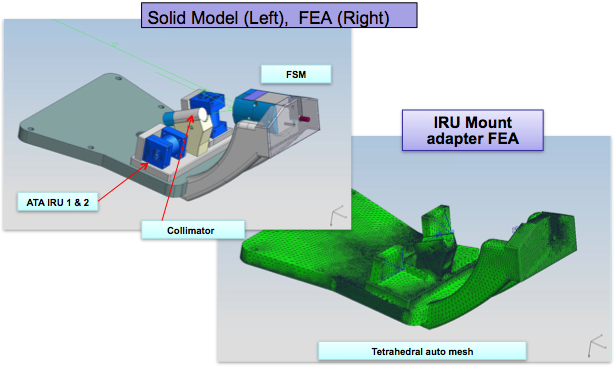
Strapdown Inertial Reference Unit for NPS Beam Jitter Control Testbed
 _______________________________
_______________________________
The aim of the project is to develop an inertial reference unit that will be able to mitigate beam jitter. Modal analysis and system identification were performed and a feedforward compensator was designed. The system will be used to investigate different beam jitter control schemes for the HEL beam control testbed at NPS.
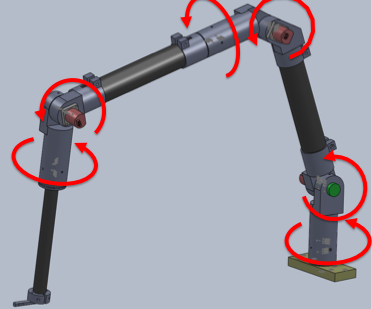
Robotic Arm for Dynamic Registration
 _______________________________
_______________________________
This is a proof of concept project to explore the applications of robotics in dentistry. The project focused on the design of a passive robotic arm (PRA) that will be attached to a six degree of freedom (DOF) industrial robot. The industrial robot is capable of dental drilling procedures on a stationary object. The PRA addresses the ability of the system of the system to detect movements of the object and accordingly adjust the drill dynamically. Video
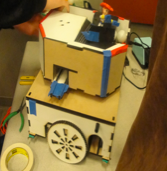
Mechatronics Project: Slug Out At The OK Corral
 _______________________________
_______________________________
The project is to design and build an autonomous robot that will be able to shoot ping pong balls to two raised targets and another autonomous robot. Targets has IR emitters on them with varying frequency to distinguish between targets and enemy robot. Click to see video of the competition