Exploring the World with a Ray of Light
The most common mobility device for the blind is still the traditional long cane. This economical, simple, and reliable tool allows the user to extend touch and "preview" the lower portion of the foreground as one walks. However, not all visually impaired individuals are able to use the long cane. Furthermore, a rigid cane is an "invasive" tool, and often ill-suited to social gatherings, public transportation, or congested areas where it may trip pedestrians.
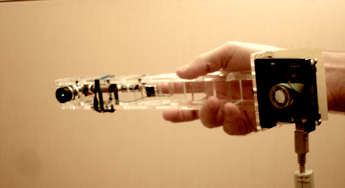
To address such problems, Manduchi's engineering group has developed a prototype mobility tool that adds a high-tech twist to the "long cane paradigm." In this case, instead of using a physical cane, a user scans the scene with a laser-based range sensing device. As the user moves the hand-held laser about, an onboard processor analyzes and integrates spatial information into a "mental image" of the scene, which is delivered to the user by means of a tactile interface.
Creating a devise that the visually impaired can trust is more difficult than one might first assume. Measuring distances to surfaces in a scene can help a user make decisions about where to move, but it may not be enough to move safely through the environment. For example, important features, such as curbs, steps, or drop-offs often go undetected by static range measurements.
In collaboration with Prof. Manduchi, we are developing a dual use prototype that can act both as a device for the visually impaired, as well as a sensor for mobile robotics. The basic premise is to project a laser fan into the environment, with the stereo vision correspondence problem solved explicitly through initial calibration, and use the reflected return to determine points and planes of obstacles.
National Science Foundation Award Link
multimedia
-
• San Francisco Chronicle Article
-
• Santa Cruz Sentinel Article
-
• Laser Focus World Article
-
• Santa Cruz Good Times Article
-
• Science Today Article
-
• UCSC Currents Article
Publications
-
(1)Ilstrup, D., Elkaim, G., “Low Cost, Low Power Structured Light Based Obstacle Detection,” ION/IEEE Position, Location, and Navigation Symposium, ION/IEEE PLANS 2008, Monterey, CA, May 5-8, 2008, pp. 865-870 (pdf)
-
(2)Ilstrup, D., Elkaim, G., “Single Frame Processing for Structured Light Based Obstacle Detection,” ION National Technical Meeting, ION NTM 2008, San Diego, CA, Jan. 28-30, 2008, pp. 514-520 (pdf)
-
(3)Lu, X., and Manduchi, R., “Detection and Localization of Curbs and Stairways Using Stereo Vision”, ICRA 2005 (pdf)
-
(4)Yuan, D., and Manduchi, R., “A Tool for Range Sensing and Environment Discovery for the Blind”, IEEE Workshop on Real-Time 3-D Sensors and Their Use, 2004. (pdf)
People
-
• Roberto Manduchi, Professor, Computer Engineering, UCSC, 831.459.1479
-
• Gabriel Elkaim, Associate Professor, Computer Engineering, UCSC, 831.459.3054
-
• David Ilstrup, PhD student (graduated), CE UCSC, now at Honda Research