Laker Sparks
laker.sparks@gmail.com
CMPS 161 Winter 09
Description:
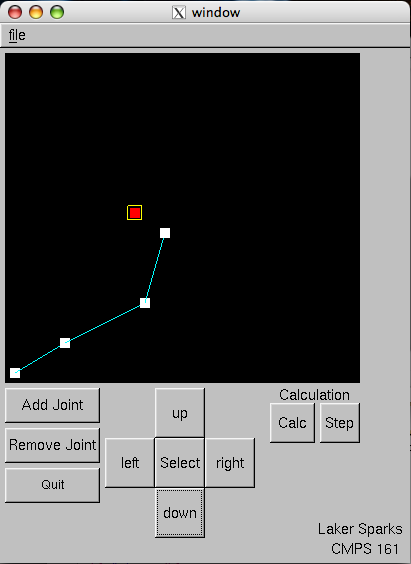
My project uses cyclic coordinate descent to calculate inverse
kinematics for a variable length and jointed arm. I used Template
Numerical Toolkit (math.nist.gov/tnt) to handle vectors and matrices
Commands:
Add Joint - adds a joint to the end of the arm
Remove Joint - removes a joint from the end of the arm
Quit - exits the program
Select - cycles through the joints (including the target)
Up/Down/Left/Right - moves the selected joint in the corresponding
direction
Calc - runs the full inverse kinematic calculation and animates it
Step - steps through the inverse kinematic calculation
ps. I appologize for the format of this webpage, html was never my thing