| |
 |
UNIVERSITY
OF CALIFORNIA,
SANTA CRUZ |
|
|
|
| |
|
|
| |
Training-free, Generic Object Detection using Locally Adaptive Regression Kernels (LARK) |
|
| |
Hae Jong Seo and Peyman Milanfar
|
|
| |
Abstract |
|
| |
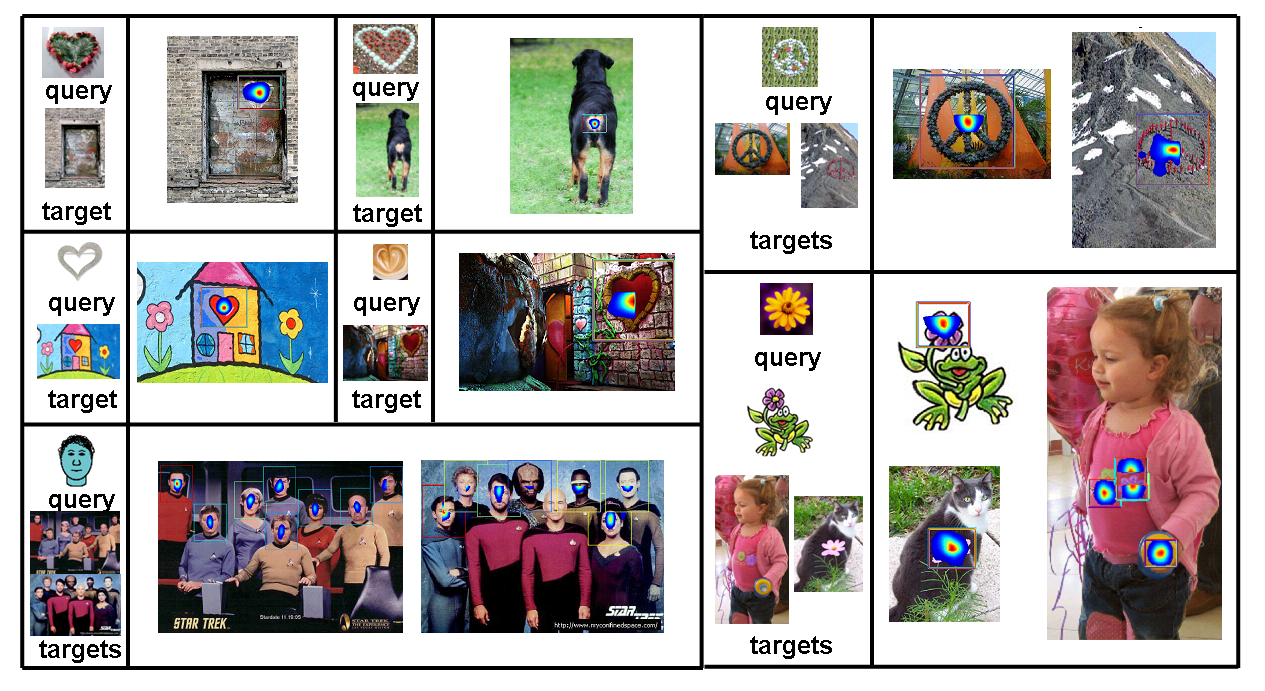
We present a generic detection/localization algorithm capable of
searching for a visual object of interest without training. The
proposed method operates using a single example of an
object of interest to find similar matches; does not require prior
knowledge (learning) about objects being sought; and does not
require any pre-processing step or segmentation of a target image.
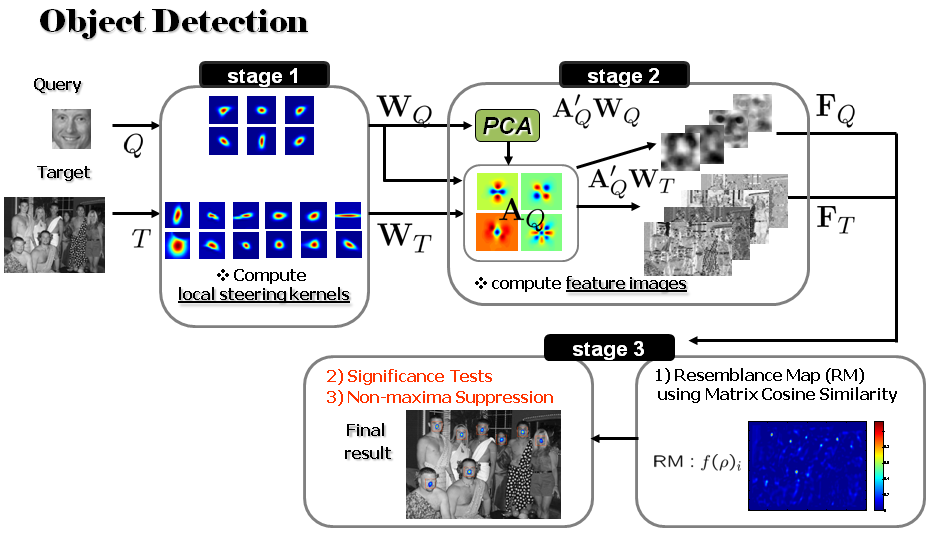
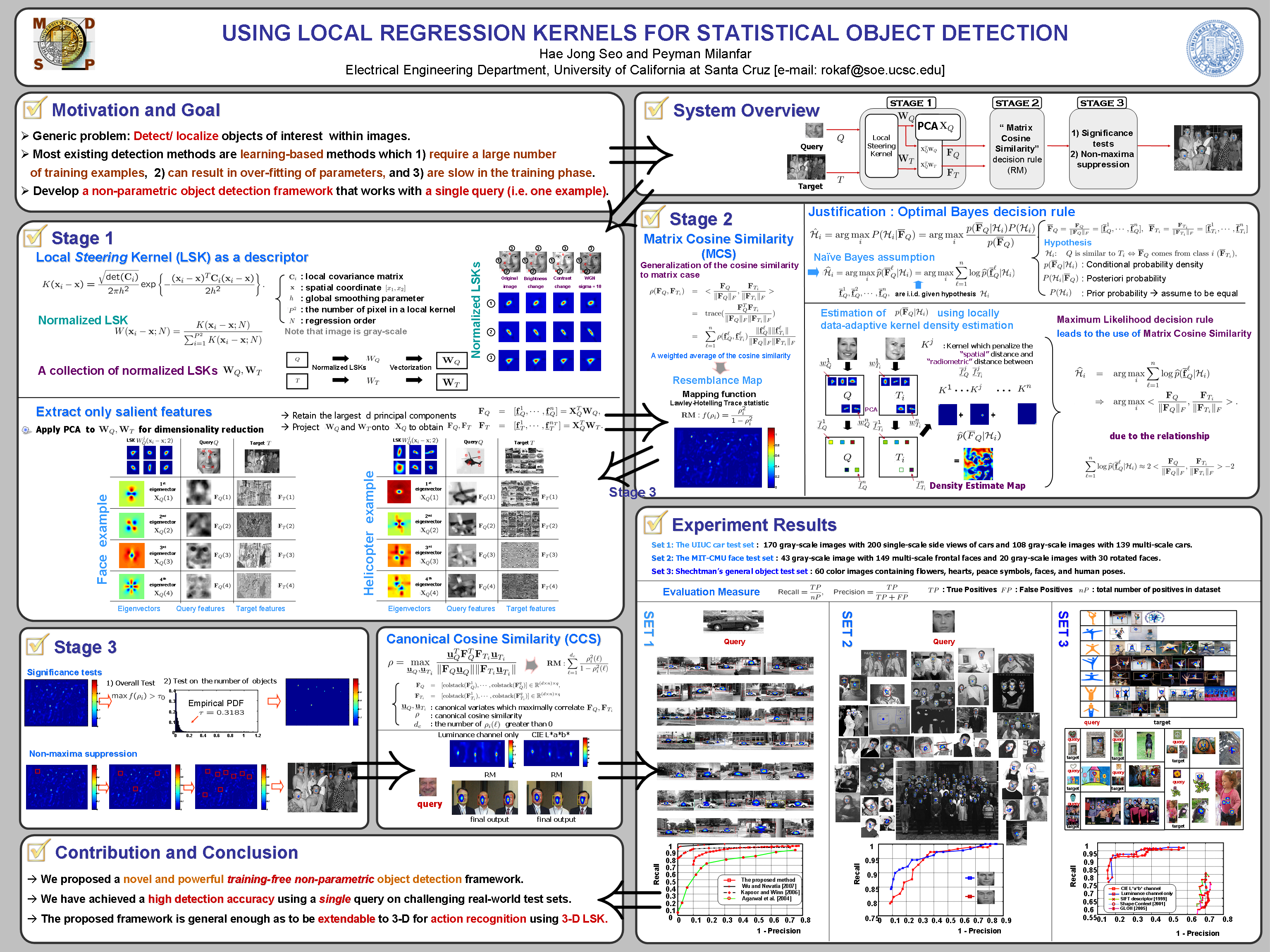
Our method is based on the computation of local regression kernels
as descriptors from a query, which measure the likeness of a pixel
to its surroundings. Salient features are extracted from said
descriptors and compared against analogous features from the target
image. This comparison is done using a matrix generalization of the
cosine similarity measure. We illustrate optimality properties of
the algorithm using a naive-Bayes framework. The algorithm yields a
scalar resemblance map, indicating the likelihood of similarity
between the query and all patches in the target image. By employing
nonparametric significance tests and non-maxima suppression, we
detect the presence and location of objects similar to the given
query. The approach is extended to account for large variations in
scale and rotation. High performance is demonstrated on several
challenging datasets, indicating successful detection of objects in
diverse contexts and under different imaging conditions.
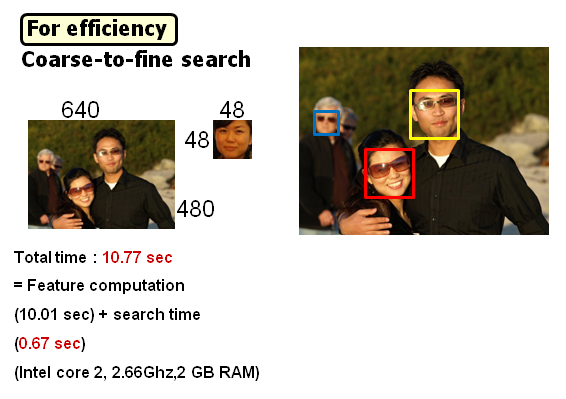
System Overview
Experimental Results
OpenCV/Matlab implementation
See more details and examples in the following papers
.
Go to action recognition page
Go to saliency detection page
|
| |
|
| |
System Overview |
|
| |
|
| |
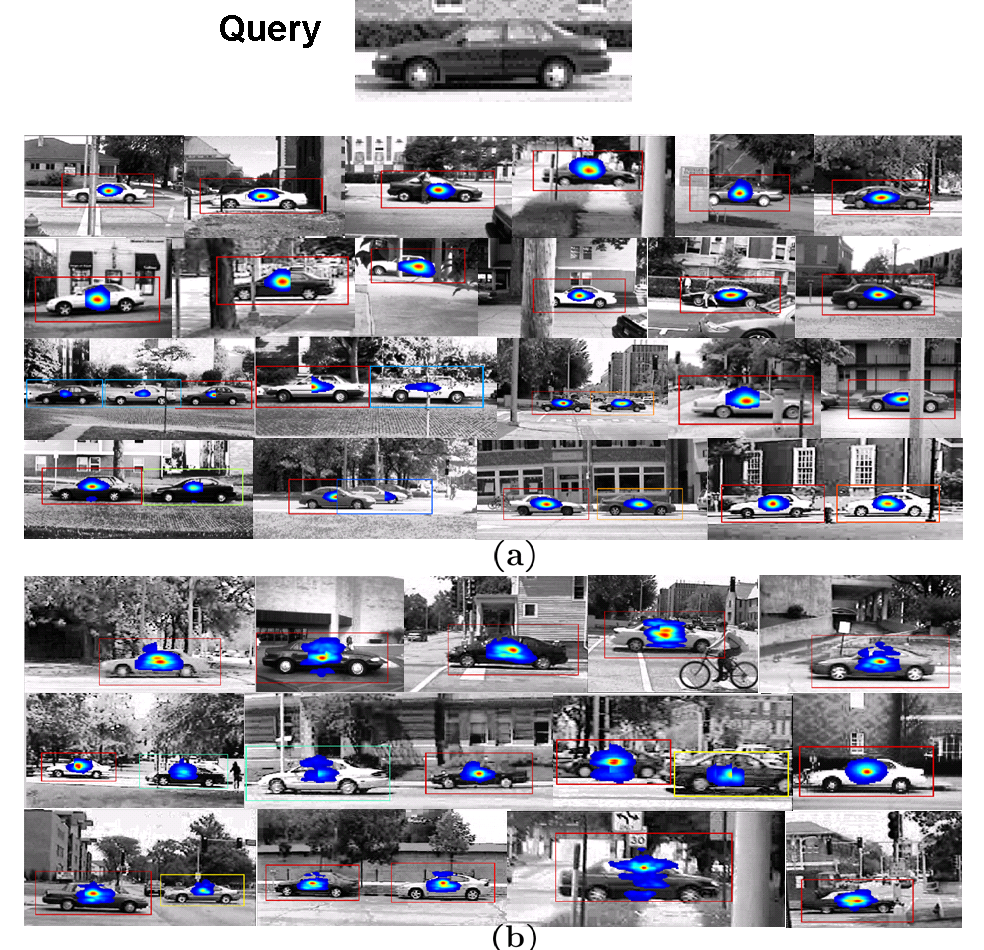
Results on the UIUC car test set |
|
| |
(a) Single-Scale Results
(b) Multi-scale Results
| |
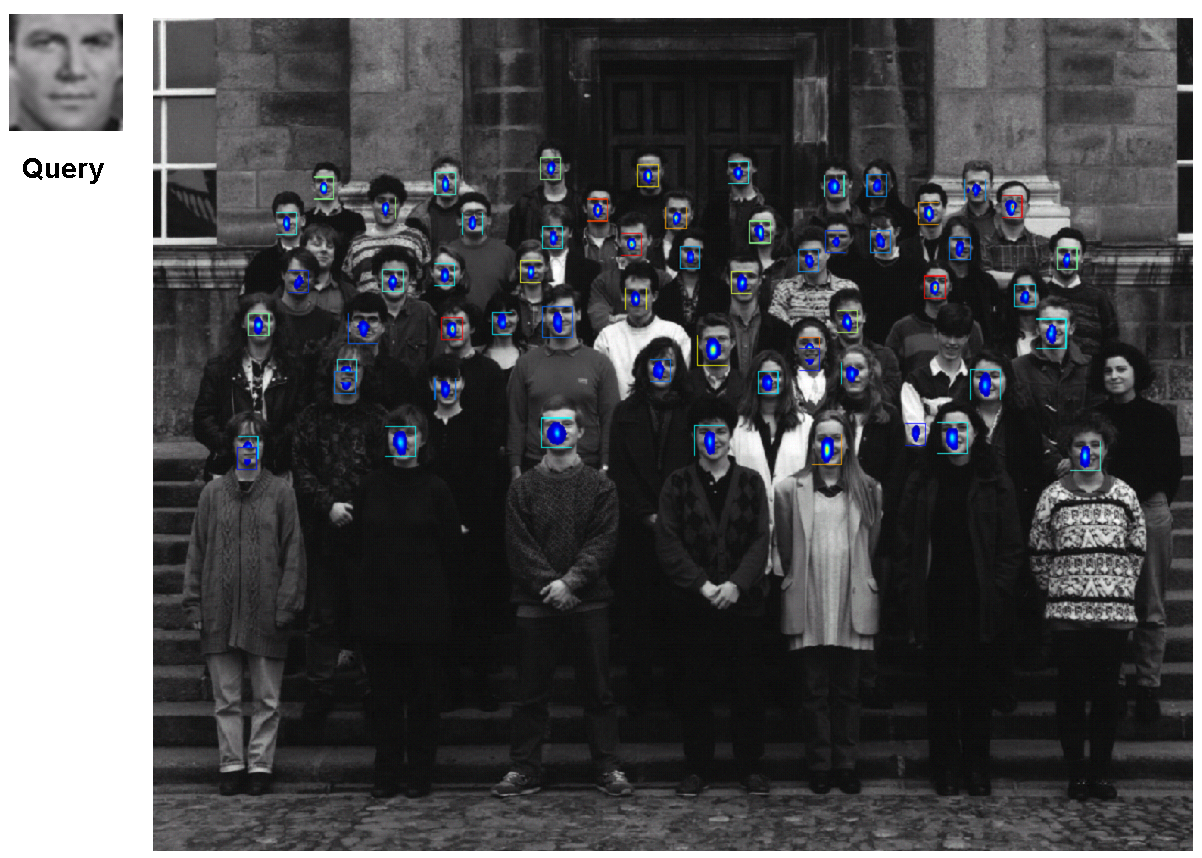
Results on the MIT-CMU face test set |
|
| |
|
| |
|
| |
|
| |
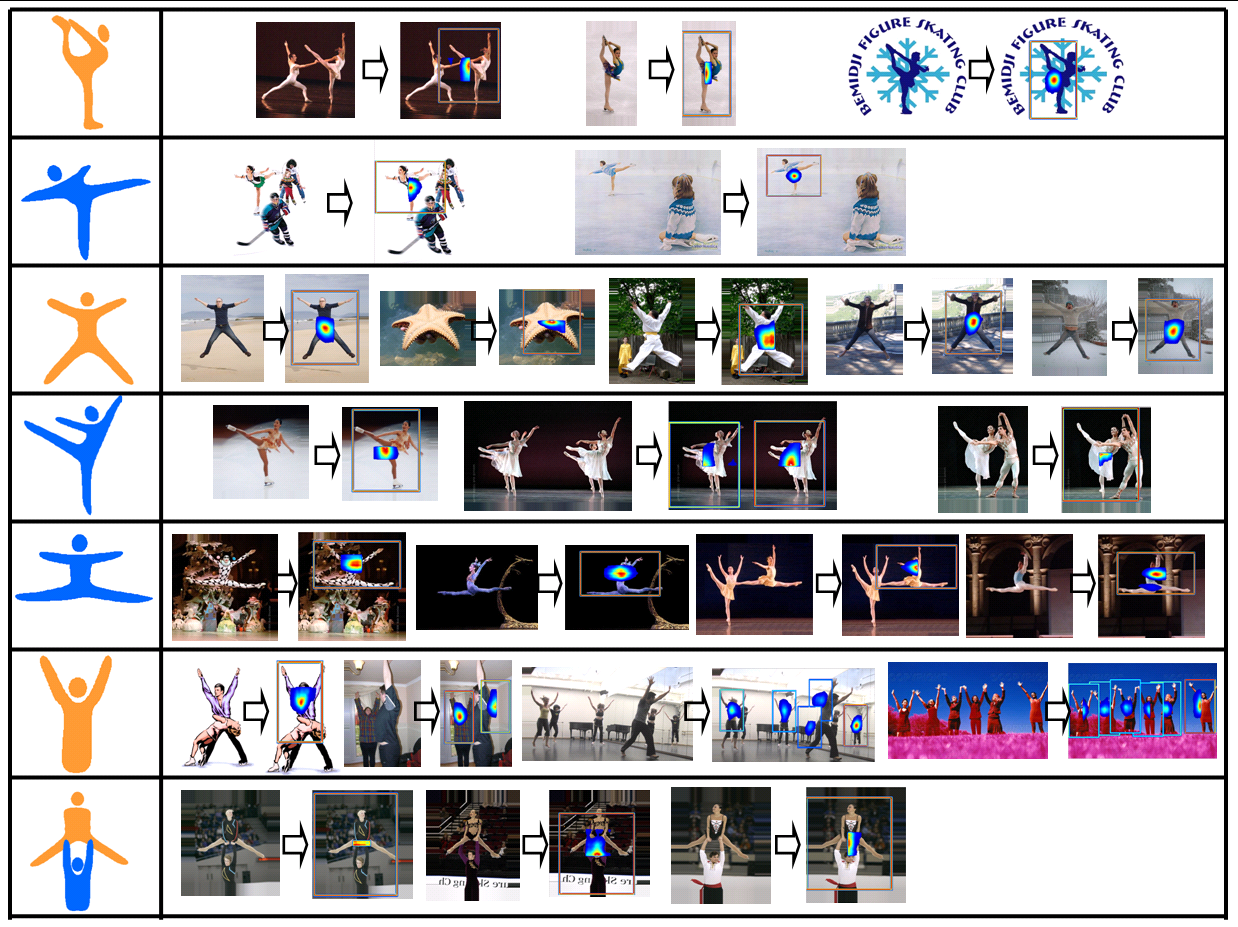
Results on Shechtman general objects test set |
|
| |
|
| |
|
| |
|
| |
|
|
|
|
| |
|
|
| |
Note: This code requires ROS to be installed first.(ROS is an open-source, meta-operating system for your robot.) : installation guide |
| |
|
|
| |
|
|
| |
Matlab Package |
|
|
| |
The package contains the software that can be used to detect object using a single query, as explained in the PAMI paper above.
The included demonstration files (demo*.m) provide the easiest way to learn how to use the code.
Disclaimer: This is experimental software. It is provided for non-commercial research purposes only. Use at your own risk. No warranty is implied by this distribution. Copyright ©
2010 by University of California.
File updated: June 2011
|
| |
Acknowledgement |
|
| |
This
work was supported in part by the US Air Force Grant F49550-07-1-0365. |
|
| |
|
|
| |
last update on June 10th, 2009 |
|
{kind=link}